Использование матстата для настройки форсунок.
Подключил ШПЛ на постоянку в мозг, получило возможность логировать фактическую смесь через эвоскан.

O2Sensor2 это и есть ШПЛ подключенная в мозг вместо второй лямбды.
Как видно несколько отличается. Особенно сильно отличается на большом значении лоада. Хотя парметры форсунок вроде расчитаны были правильно.
Посетила меня мысль накатать небольшую статистику и посмотреть на распределение зависимости смеси от лоада.
Прокатился на дачу, лог получился на 2.5 метра. Графически выглядит так:
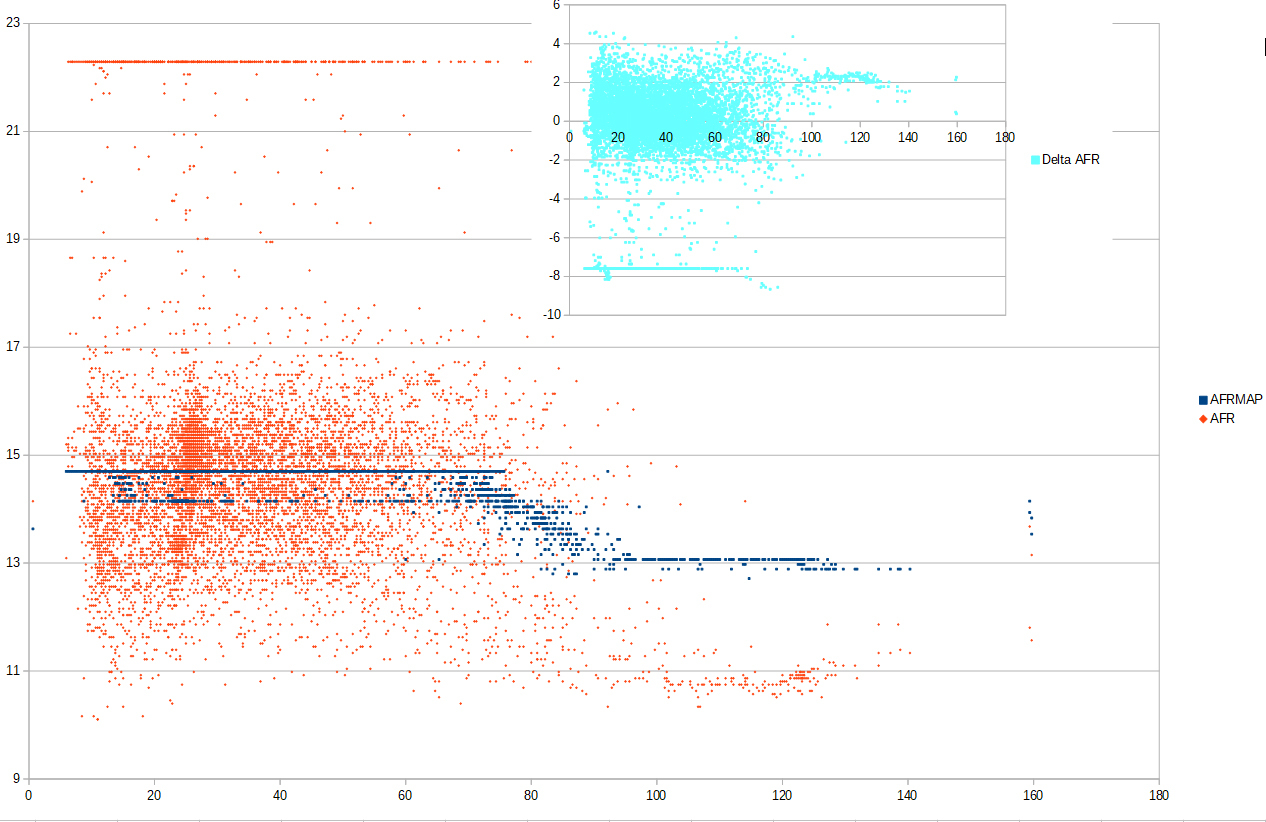
AFRMap (синий цвет) -- целевая смесь, которую старается вывести мозг.
AFR (оранжевый цвет) -- фактическая смесь по сенсору.
DeltaAFR -- разница между ними.
Хорошо видно, что при низком значении лоада все ОК и несмотря на большой разброс среднее значение смеси колеблется около целевого. А вот при большом лоаде уплывает. Предположил, что это может быть связано с неправильным подбором производительности форсунок и latency. Т.е. в теории может быть, что форсунки указаны как недостаточно поизводительные, а вот задержки указаны небольшие. В результате это может дать подобную картину.
Попробовал увеличить производительность и latency. Получилась картина немного лучше.
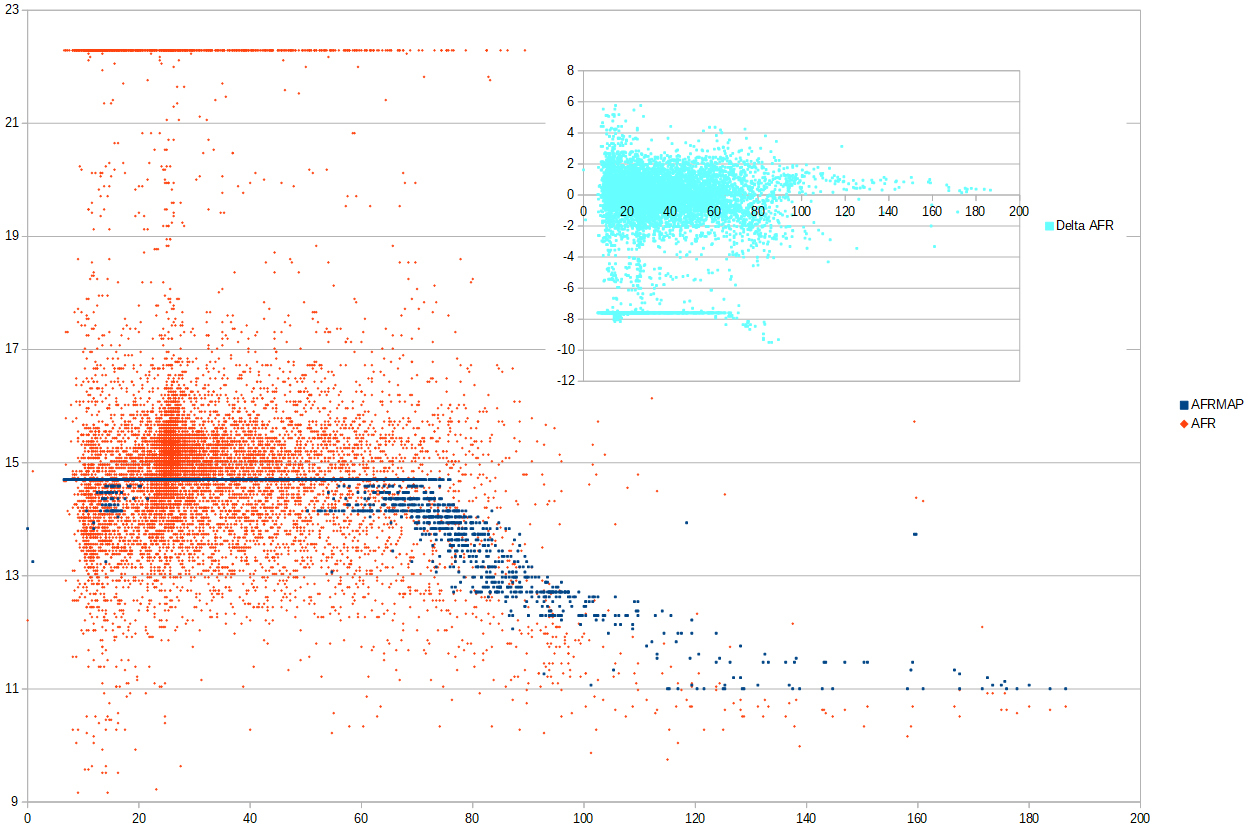
Теперь разница укладывается в единицу, но значения задержек какие-то не очень разумные.
И тут я пригляделся к DeltaAFR. На обоих графиках очевидно, что смесь уползает при превышении лоадом значения 80-100. Т.е. при включении полного питания на насосе. Учитывая, что регулятор у меня стоит внешний Aeromotive, стало быть упираюсь в обратку, а скорее всего в эжектор.